概述
简单的两骨IK可以通过Two Bones IK解决,但实际开发中有许多多骨骼的链式IK,同时人体的不同骨骼有不同的约束,Two Bones IK难以解决,此时可以通过CCD求解;
核心思想
把节点最末端的Joint往上一根Joint和目标点之间的连线翻转,然后再翻下一根骨头,以此类推;

CCD优化
有时如果第一次翻得太过了,后面骨头的翻转就显得差点意思;

解决方法:
- 在目标点加一个相对大的范围,翻转到大致范围的目标点,第二次迭代的时候再缩小范围;

- 限制Joint旋转角度;
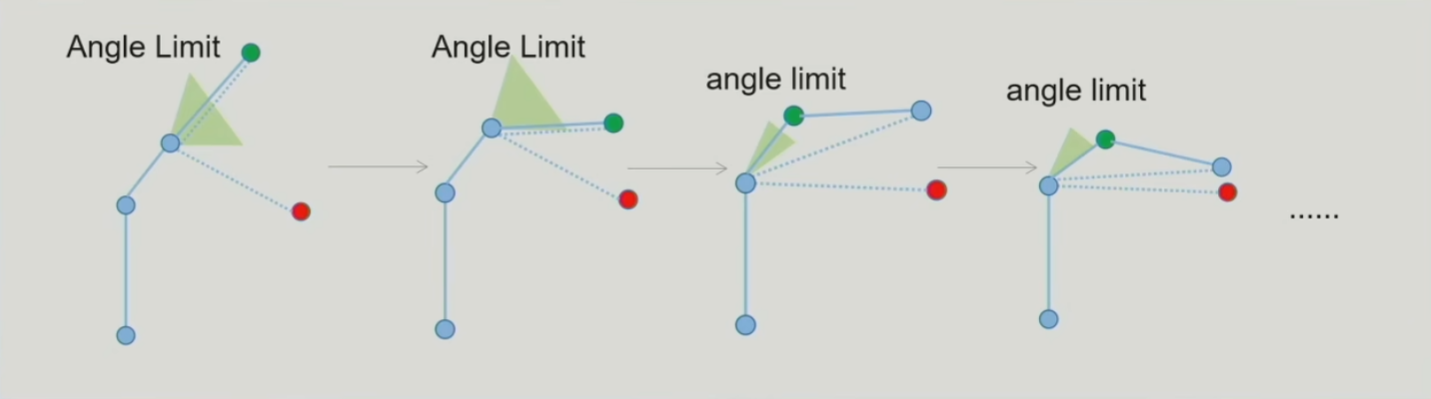
简单的两骨IK可以通过Two Bones IK解决,但实际开发中有许多多骨骼的链式IK,同时人体的不同骨骼有不同的约束,Two Bones IK难以解决,此时可以通过CCD求解;
把节点最末端的Joint往上一根Joint和目标点之间的连线翻转,然后再翻下一根骨头,以此类推;
有时如果第一次翻得太过了,后面骨头的翻转就显得差点意思;
解决方法: